咨询热线:
咨询热线:无人机飞控
基于模型的无人机飞控系统设计及验证
某型无人机飞行控制系统以飞行控制计算机为核心,包括传感器部件、运动舵机、测控链路等,可以实现自主起飞与返场着陆、自主执行任务。
无人机飞控系统主要功能包括:三轴控制增稳和姿态保持、自主导航、机载系统管理、应急处置等。主要机载设备包括:飞行控制计算机、大气数据系统、舵机、测控系统测量采集系统、起落架系统、前轮转弯系统、发动机等。
基于ATSPACE无人机数字孪生设计平台,进行某型无人机飞控系统设计及验证,主要内容如下:
1)首先建立无人机系统的运行场景模型,梳理飞行控制系统的功能/性能需求,完成利益相关者需求分析
2)在1)基础上,开展系统架构模型设计、完成系统运行模型与系统控制模型综合设计,并使用了模型接口将系统运行模型与系统控制模型进行综合,结合飞机动力学模型、环境模型、地面站系统等,形成了具有“虚拟铁鸟”特征的无人机飞行控制系统虚拟测试环境,实现基于模型的全系统综合集成试验
3)最后使用自动代码生成技术生成机载软件,实现机载系统模型到机载代码的自动转换,加载到飞行控制计算机中,完成半实物铁鸟综合试验、滑行及飞行试验
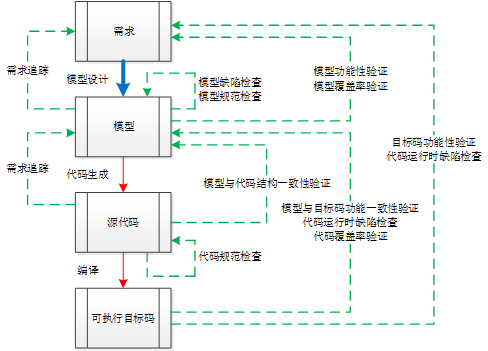
基于模型开发的工作流程
? 设计环节。建立模型与需求文档的链接,实现模型与需求的双向可追溯性。基于高层需求进行模型的设计,在模型设计过程中可以不断通过仿真检验设计结果从而反复迭代优化设计。模型代替传统设计流程中详细设计文档。
? 实现环节。通过自动生成代码实现从设计(Design)到实现(Implementation)的过渡,简化传统设计流程中多次建模的重复劳动,使工程师更加专注于各自的专业。
? 验证环节。验证环节贯穿于全生命周期,特别是在模型设计阶段,就可以开展针对设计的基于需求的功能性测试,以及模型的覆盖率测试,且早期验证的测试用例可以在代码验证阶段得到重用。
模型设计
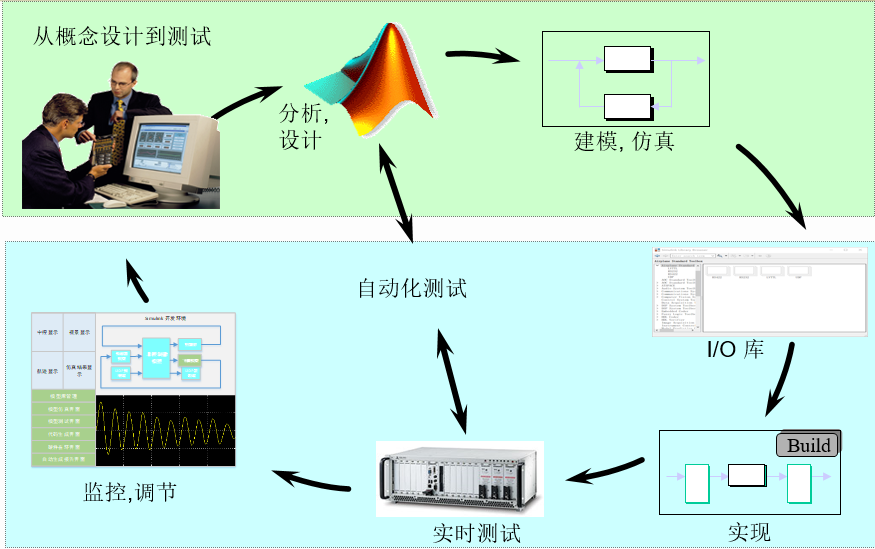
基于模型的无人机飞控系统集成开发环境
在系统运行场景模型和系统架构模型设计时,使用了SYSML语言和IBM Rhapsody工具;
在系统运行模型和系统控制算法时,则使用了MATLAB/Simulink/Stateflow设计;
模型验证
验证过程如下:
ü 模型逐级传递,使用Maltlab等工具完成运行场景模型和系统功能模型的设计与仿真验证;
ü 在模型集成综合阶段,采用Matlab/Simulink作为模型运行平台,基于ATSPACE无人机数字孪生设计平台完成模型综合集成验证,并基于综合模型建立了飞行控制系统“虚拟铁鸟”,开展基于模型的飞行控制系统/地面站/试验环境的联合试验,在初步设计阶段即对系统完成了集成验证与虚拟飞行试验,确认了全系统功能/性能满足飞行控制系统的研制需求;
ü 基于模型的经过前期充分验证后的机载系统,在半实物试验/机上地面试验/试飞验证过程中,相较于传统的型号研发,减少了很多不必要的设计反复迭代,缩短了试验验证周期,显著地减少了物理试验的次数和成本。
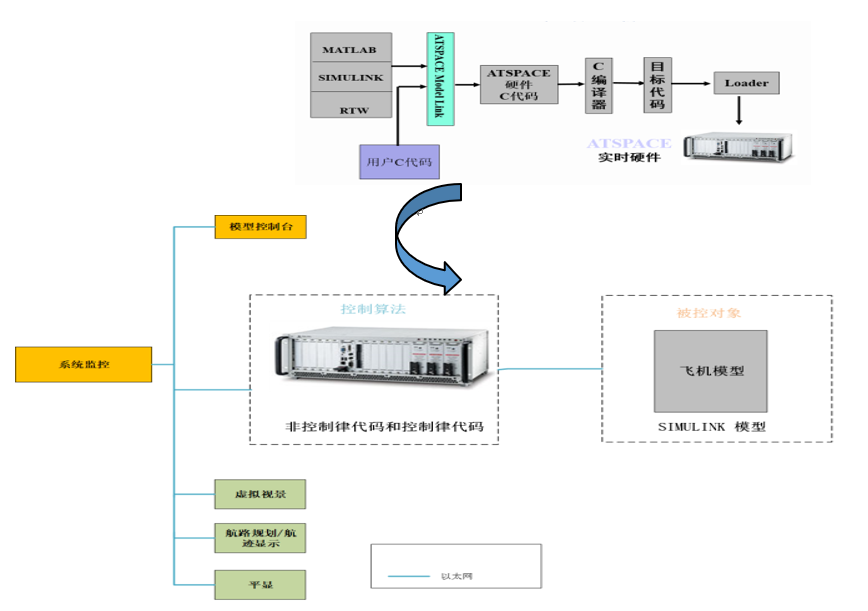
MIL(Model-in-the-Loop Simulation)—模型在环测试

MIL(Model-in-the-Loop Simulation)—模型在环测试
将控制算法模型和被控对象模型连起来形成闭环,即在模型层面上实现闭环测试。如图对无人机系统设计的非控制律和控制律部分进行综合,确认系统功能/性能是否满足设计要求。主要检查项目包括系统模型与试验环境的接口、试验环境的功能/性能,以及全系统综合功能/性能。
SIL(Software -in-the-Loop)—软件在环测试
将控制策略模型转换成的C代码,把控制策略模型替换成由控制策略模型转换得到的C代码,我们得到了和MIL测试相同的结果,生成的C代码就和用于代码生成的模型是一致的。
SIL测试的目的就是为了验证自动生成的代码和用于代码生成的模型中行为是否一致的。
HIL(Hardware-in-the-Loop)—硬件在环测试
当控制系统设计结束,并已制成产品型控制器,需要在闭环下对其进行详细测试。但由于种种原因如:极限测试、失效测试,或在真实环境中测试费用较昂贵等,使测试难以进行,例如:在积雪覆盖的路面上进行飞机防抱死装置( ABS )控制器的小摩擦测试就只能在冬季有雪的天气进行;
有时为了缩短开发周期,则在控制器运行环境不存在的情况下对其进行测试。
无人机飞控系统硬件在环测试
验证结果
通过基于模型的ATSPACE无人机数字孪生设计平台进行某型无人机飞控系统的开发,有效地改进了现有的飞行控制系统设计流程,在设计前期完成了系统/控制律/地面站的虚拟飞行试验,形成了一种基于模型的系统研发模式和设计流程,大量减少了真实物理试验的次数,提高了系统早期的设计成熟度,显著地提升了该型无人机系统的研发效率。